| 详细参数 |
| 品牌 | 其他 | 型号 | AB-ABR-VRB |
| 适用范围 | 工业用 | 极数 | 4极 |
| 定子相数 | 两相 | 转子结构 | 绕线式 |
| 机壳保护方式 | 防护式 | 加工定制 | 是 |
| 额定功率 | 6-200W | 额定转速 | 90-1400r/min |
| 额定电压 | 220-380V | 额定电流 | 1-10A |
| 额定频率 | 50-60HZ | 额定转矩 | 1-15N.M |
| 效率 | 95-99% | 功率因数 | 68 |
| 绝缘等级 | IP65 | 防护等级 | IP55 |
| 产品认证 | 3CCE | 噪声 | 50FB |
| 外形尺寸 | | | |
两水镇AB90-L1-3-P1-S1-19-35-70-90-M5伊明造
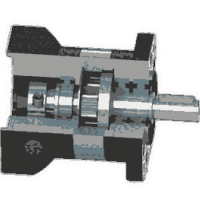
精密行星减速机的安装是一个非常重要的环节,其安装质量直接影响到减速机的使用寿命和性能。以下是关于精密行星减速机安装的一些基本步骤和注意事项。
首先,我们需要选择合适的安装位置。精密行星减速机应安装在平稳、结实的基础之上,并确保周围环境干燥、清洁、通风良好。同时,应避免在温度变化剧烈或湿度过大的地方安装减速机。
其次,我们需要对行星架和输入轴进行的测量,以确保二者的配合精度。行星架的径向和轴向跳动应控制在0.02mm以内,输入轴的径向和轴向跳动也应控制在0.01mm以内。同时,行星架和输入轴的表面应保持光滑,无划痕、毛刺等缺陷。
接下来,我们需要将行星架与输入轴进行装配。在这个过程中,我们需要注意行星架和输入轴的配合精度,以及行星架和内齿圈的配合精度。此外,我们还需要注意行星架和输入轴的同心度,以及行星架和内齿圈的同心度。
在装配完成后,我们需要对减速机进行试运转。试运转的目的是检查减速机的安装质量,以及其运行是否正常。在试运转过程中,我们需要注意减速机的噪音、振动、温升等情况,以及减速机的输出扭矩和转速是否满足设计要求。
后,我们需要对减速机进行定期的维护和保养。在使用过程中,我们需要定期检查减速机的润滑油情况,以及减速机的工作状态。同时,我们还需要定期对减速机进行清洁和润滑,以保证减速机的正常使用寿命。
总的来说,精密行星减速机的安装是一个需要精细操作的过程。只有通过严格的测量、的装配、认真的试运转和维护,才能保证减速机的安装质量和运行性能。
两水镇AB90-L1-3-P1-S1-19-35-70-90-M5伊明造

VRB115-30-35-40-50-60-70-80-100-S2-P1
VRB142-3-4-5-6-7-8-10-15-20-25-S2-P1
VRB142-30-35-40-50-60-70-80-100-S2-P1
VRB180-3-4-5-6-7-8-10-15-20-25-S2-P1
VRB180-30-35-40-50-60-70-80-100-S2-P1
VRB220-3-4-5-6-7-8-10-15-20-25-S2-P1
VRB220-30-35-40-50-60-70-80-100-S2-P1
VRS060-3-4-5-6-7-8-10-15-16-20-S2-P2
VRS060-25-28-30-35-40-50-70-S2-100-P2
VRS060-3-4-5-6-7-8-10-15-16-20-S2-P1
VRS060-25-28-30-35-40-50-70-S2-100-P1
VRS075-3-4-5-6-7-8-10-15-16-20-S2-P2
VRS075-25-28-30-35-40-50-70-S2-100-P2
VRS075-3-4-5-6-7-8-10-15-16-20-S2-P1
VRS075-25-28-30-35-40-50-70-S2-100-P1
VRS100-3-4-5-6-7-8-10-15-16-20-S2-P2
VRS100-25-28-30-35-40-50-70-S2-100-P2
VRS100-3-4-5-6-7-8-10-15-16-20-S2-P1
VRS100-25-28-30-35-40-50-70-S2-100-P1
VRS140-3-4-5-6-7-8-10-15-16-20-S2-P2
VRS140-25-28-30-35-40-50-70-S2-100-P2
VRS140-3-4-5-6-7-8-10-15-16-20-S2-P1
VRS140-25-28-30-35-40-50-70-S2-100-P1
VRS180-3-4-5-6-7-8-10-15-16-20-S2-P2
VRS180-25-28-30-35-40-50-70-S2-100-P2
VRS180-3-4-5-6-7-8-10-15-16-20-S2-P1
VRS180-25-28-30-35-40-50-70-S2-100-P1
VRT064-4-5-7-10-20-25-35-40-50-70-100-P1
VRT090-4-5-7-10-20-25-35-40-50-70-100-P1
VRT110-4-5-7-10-20-25-35-40-50-70-100-P1
VRT140-4-5-7-10-20-25-35-40-50-70-100-P1
VRT200-4-5-7-10-20-25-35-40-50-70-100-P1
VRT255-4-5-7-10-20-25-35-40-50-70-100-P1
两水镇AB90-L1-3-P1-S1-19-35-70-90-M5伊明造

直角行星减速器在机械手臂设备上的应用
一、引言
机械手臂设备在许多工业领域中发挥着重要的作用,如生产线上的装配、搬运和焊接等工作。直角行星减速器作为一种重要的传动装置,在机械手臂设备中得到广泛应用。本文将详细阐述直角行星减速器在机械手臂设备上的应用。
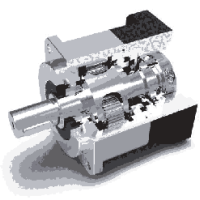
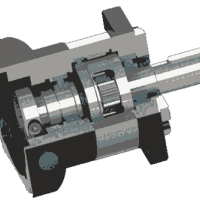
二、直角行星减速器的工作原理与特点
直角行星减速器是一种采用行星轮系作为传动原理的减速装置。它通过太阳轮、行星轮和内齿圈的相互作用,实现动力的减速和放大。与普通齿轮减速器相比,直角行星减速器的输出轴与输入轴垂直,具有更高的传动效率和更小的体积。
三、直角行星减速器在机械手臂设备中的应用
驱动机械手臂:机械手臂是机械人技术中典型的执行机构,它可以在各种环境下实现物体的抓取、搬运和放置等操作。直角行星减速器作为机械手臂的驱动部件,能够提供稳定、的动力输出,实现机械手臂的控制。
增强机械手臂的刚性和精度:直角行星减速器的应用可以显著增强机械手臂的刚性和精度。由于行星轮系的传动原理,直角行星减速器具有较高的传动效率和高精度,能够保证机械手臂在运动过程中具有较高的位置精度和重复精度。
降低噪音和振动:直角行星减速器采用行星轮系作为传动原理,具有较好的平衡性,可以有效降低噪音和振动。这对于需要高精度操作的机械手臂设备来说是非常重要的。
实现快速响应:直角行星减速器具有较快的响应速度,能够实现机械手臂的快速动作和控制。这对于需要快速响应的机械手臂设备来说是至关重要的。
四、直角行星减速器的未来发展趋势
随着机械手臂技术的不断进步和发展,直角行星减速器的未来发展将更加注重以下几个方面:
更小的体积:为满足机械手臂设备小型化、轻量化的需求,直角行星减速器的体积将进一步缩小,同时保持率和精度。
更高的传动效率:随着能源效率要求的提高,直角行星减速器的传动效率将进一步提升,以实现更的能源利用。
更强的环境适应性:为应对各种复杂环境条件,直角行星减速器的设计和材料选择将更加注重环境适应性。例如,对于高温、低温或腐蚀性环境下的机械手臂设备,直角行星减速器需要具备相应的防护措施和材料选择。
更智能的控制:随着人工智能和机器学习技术的发展,直角行星减速器的控制将更加智能化。通过引入传感器和先进的控制算法,实现机械手臂设备的自适应学习和优化控制,提高机械手臂设备的运动性能和智能化水平。
一体化设计:随着机械手臂设备集成度的不断提高,直角行星减速器将更加注重一体化设计。通过将多种功能集成到单个传动装置中,实现机械手臂设备的紧凑型设计,降低成本并提高设备的可靠性。
五、结论
综上所述,直角行星减速器在机械手臂设备中发挥着重要的作用。它具有率、高精度和高刚性等优点,为机械手臂设备的运动控制和动力输出提供了可靠的支持。随着技术的不断进步和发展,直角行星减速器的未来发展将更加注重体积小型化、节能、环境适应性和智能化控制等方面。
两水镇AB90-L1-3-P1-S1-19-35-70-90-M5伊明造

 微信客服
微信客服



 查看详情
查看详情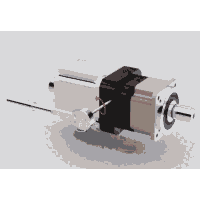 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情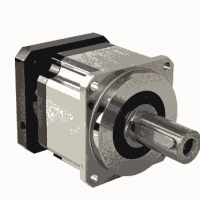 查看详情
查看详情