| 详细参数 |
| 品牌 | 其他 | 型号 | AB-ABR-VRB |
| 适用范围 | 工业用 | 极数 | 4极 |
| 定子相数 | 两相 | 转子结构 | 绕线式 |
| 机壳保护方式 | 防护式 | 加工定制 | 是 |
| 额定功率 | 6-200W | 额定转速 | 90-1400r/min |
| 额定电压 | 220-380V | 额定电流 | 1-10A |
| 额定频率 | 50-60HZ | 额定转矩 | 1-15N.M |
| 效率 | 95-99% | 功率因数 | 68 |
| 绝缘等级 | IP65 | 防护等级 | IP55 |
| 产品认证 | 3CCE | 噪声 | 50FB |
| 外形尺寸 | | | |
红果子镇PS090L1-005-P2-S1-19-41-70-90-M5伊明供应
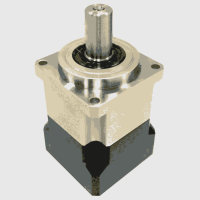
缝纫机使用的减速机原理主要是通过降低电机的转速,同时增加输出扭矩,从而实现对缝纫机头的动力传输。
缝纫机减速机一般由多级齿轮组成,通过不同大小的齿轮比实现速度的降低。当电机带动减速机的输入轴旋转时,齿轮在齿轮箱中相互啮合,将电机的动力传递到输出轴。由于齿轮的大小和数量不同,输出的速度会比输入的速度降低,同时输出的扭矩会比输入的扭矩增加,从而实现对缝纫机头的动力传输。
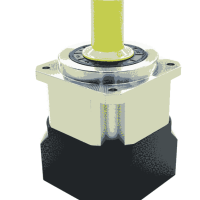
缝纫机使用的减速机具有率、高精度和高可靠性等特点。齿轮的加工和啮合可以保证输出的稳定性和精度,同时也可以提高缝纫机的效率和使用寿命。
缝纫机减速机的应用范围非常广泛,包括各种类型的缝纫机头和缝纫设备。不同类型的缝纫机头需要不同的减速比来满足其特定的需求,因此需要根据具体的应用场景来选择适合的减速机型号。
总之,缝纫机使用的减速机是一种专为缝纫机设计的部件,通过降低电机的转速并增加输出扭矩,实现对缝纫机头的动力传输。它的率、高精度和高可靠性等特点使得它成为缝纫机械中不可或缺的一部分。
红果子镇PS090L1-005-P2-S1-19-41-70-90-M5伊明供应

TA-060-L1-R003-R004-R005-P1-P2
TA-060-L1-R006-R007-R008-R010-P1-P2
TA-060-L2-R015-R020-R025-R030-R040-P1-P2
TA-060-L2-R050-R060-R070-R080-R100-P1-P2
TA-090-L1-R003-R004-R005-P1-P2
TA-090-L1-R006-R007-R008-R010-P1-P2
TA-090-L2-R015-R020-R025-R030-R040-P1-P2
TA-090-L2-R050-R060-R070-R080-R100-P1-P2
TA-120-L1-R003-R004-R005-P1-P2
TA-120-L1-R006-R007-R008-R010-P1-P2
TA-120-L2-R015-R020-R025-R030-R040-P1-P2
TA-120-L2-R050-R060-R070-R080-R100-P1-P2
TA-150-L1-R003-R004-R005-P1-P2
TA-150-L1-R006-R007-R008-R010-P1-P2
TA-150-L2-R015-R020-R025-R030-R040-P1-P2
TA-150-L2-R050-R060-R070-R080-R100-P1-P2
红果子镇PS090L1-005-P2-S1-19-41-70-90-M5伊明供应

伺服行星齿轮减速机和谐波减速器在关节机械人设备上的适配性分析
一、引言
关节机械人是现代工业、、等领域中广泛应用的一种高精度、高灵活性的机器人设备。伺服行星齿轮减速机和谐波减速器作为两种常用的传动装置,在关节机械人的应用中具有重要的作用。本文将对这两种减速机在关节机械人设备上的适配性进行分析,以期为关节机械人的设计和应用提供参考。
二、关节机械人的传动需求
关节机械人需要通过传动装置实现各关节的控制和协调运动。传动装置的性能直接影响到关节机械人的运动精度、动态性能和寿命。因此,关节机械人对传动装置有以下要求:
高精度:关节机械人需要实现高精度的位置控制和轨迹跟踪,传动装置必须具有较高的传动精度和回差精度。
高刚性:关节机械人在运动过程中需要承受较大的惯性和冲击力,传动装置必须具备较高的刚性和抗冲击能力。
率:关节机械人需要实现的运动和能量传输,传动装置必须具有较高的传动效率和较低的能耗。
小体积:关节机械人的结构紧凑,传动装置需要尽可能减小体积和重量,以便于集成和安装。
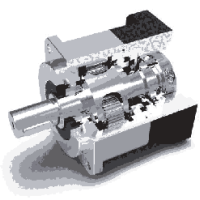
三、伺服行星齿轮减速机在关节机械人设备上的适配性分析
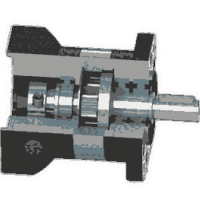
伺服行星齿轮减速机具有高精度、高刚性、率等优点,适用于许多高要求的应用场景。在关节机械人设备上,伺服行星齿轮减速机具有以下适配性:
高精度:伺服行星齿轮减速机采用行星轮系的传动原理,能够实现高精度的位置控制和轨迹跟踪,满足关节机械人对传动精度的要求。
高刚性:伺服行星齿轮减速机的行星轮和内齿圈之间采用刚性连接,能够承受较大的惯性和冲击力,满足关节机械人对刚性的要求。
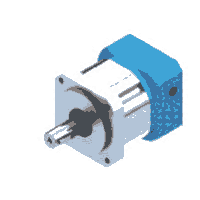
率:伺服行星齿轮减速机的传动效率高,能够实现的运动和能量传输,降低关节机械人的能耗。
易于控制:伺服行星齿轮减速机可以与伺服电机直接连接,实现的速度和位置控制,方便关节机械人的运动控制。
四、谐波减速器在关节机械人设备上的适配性分析
谐波减速器具有体积小、结构紧凑、传动比大等优点,适用于空间受限或需要较大传动比的场景。在关节机械人设备上,谐波减速器具有以下适配性:
小体积:谐波减速器的体积小,结构紧凑,能够方便地集成到关节机械人的结构中,减小整体体积和重量。
大传动比:谐波减速器的传动比大,能够在较小的空间内实现较大的减速比,满足关节机械人对传动比的要求。
易于维护:谐波减速器的结构相对简单,维护方便,能够降低关节机械人的维护成本。
五、结论
通过对伺服行星齿轮减速机和谐波减速器在关节机械人设备上的适配性分析,可以得出以下结论:
伺服行星齿轮减速机适用于对精度、刚性和效率要求较高的关节机械人设备,能够实现高精度的位置控制和轨迹跟踪,提高关节机械人的运动精度和动态性能。
谐波减速器适用于空间受限或需要较大传动比的关节机械人设备,能够减小整体体积和重量,降低维护成本。在实际应用中,应根据关节机械人的具体需求和使用环境进行综合评估和选择。

红果子镇PS090L1-005-P2-S1-19-41-70-90-M5伊明供应

 微信客服
微信客服



 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情