| 详细参数 |
| 品牌 | 其他 | 型号 | AB-ABR-VRB |
| 适用范围 | 工业用 | 极数 | 4极 |
| 定子相数 | 两相 | 转子结构 | 绕线式 |
| 机壳保护方式 | 防护式 | 加工定制 | 是 |
| 额定功率 | 6-200W | 额定转速 | 90-1400r/min |
| 额定电压 | 220-380V | 额定电流 | 1-10A |
| 额定频率 | 50-60HZ | 额定转矩 | 1-15N.M |
| 效率 | 95-99% | 功率因数 | 68 |
| 绝缘等级 | IP65 | 防护等级 | IP55 |
| 产品认证 | 3CCE | 噪声 | 50FB |
| 外形尺寸 | | | |
山坑乡MPVB-090B-070-P2-19-70-90用心提升
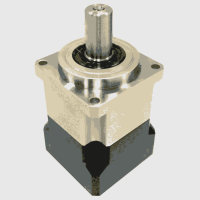
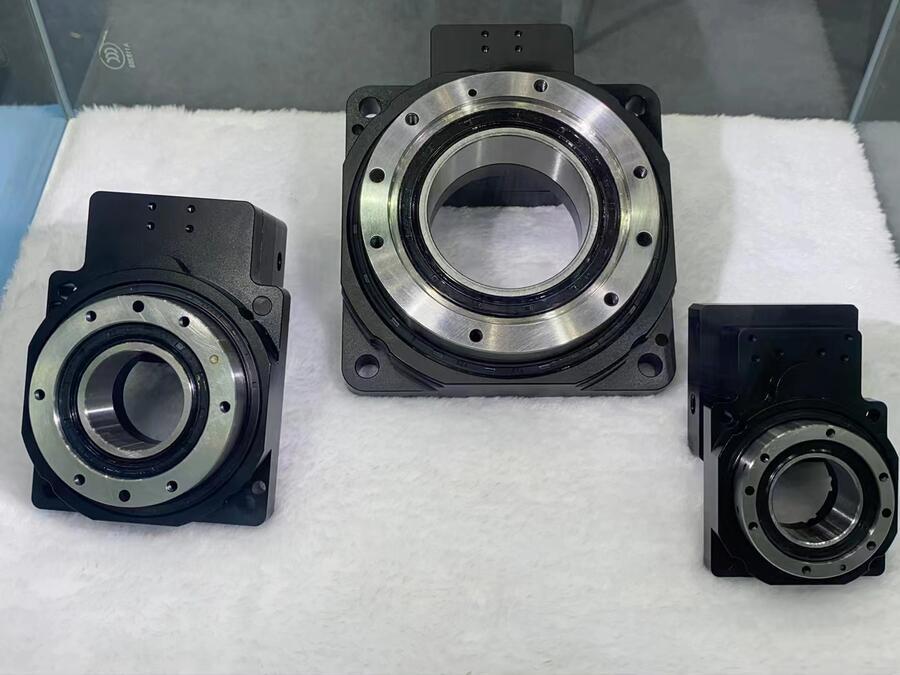
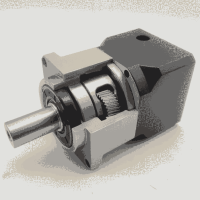
EAMON/伊明牌VRB120精密行星减速机减速比:
单段速比:3,4,5,7,10;
双段速比:15, 20, 25, 30, 35, 40, 50,70, 100;
VRB120精密行星减速机背隙:
单段:≤3arcmin / ≤5arcmin(P1/P2);
双段:≤5arcmin / ≤8arcmin(P1/P2);
VRB120精密减速机输出额定力矩:
T2N:220 Nm - 350 Nm;
VRB120精密行星减速机效率:
单段:≤ 97%;
双段:≤ 94%;
山坑乡MPVB-090B-070-P2-19-70-90用心提升

VRT-140B-4-5-6-7-8-10-16-20-25-F3-38KA35
VRT-140B-28-35-40-50-60-70-80-100-F3-38KA35
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HA22
VRT-140B-28-35-40-50-60-70-80-100-F3-28HA22
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HA24
VRT-140B-28-35-40-50-60-70-80-100-F3-28HA24
VRT-140B-4-5-6-7-8-10-16-20-25-F3-48KA42
VRT-140B-28-35-40-50-60-70-80-100-F3-48KA42
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HB22
VRT-140B-28-35-40-50-60-70-80-100-F3-28HB22
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HF22
VRT-140B-28-35-40-50-60-70-80-100-F3-28HF22
VRT-140B-4-5-6-7-8-10-16-20-25-F3-38JA32
VRT-140B-28-35-40-50-60-70-80-100-F3-38JA32
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28FE24
VRT-140B-28-35-40-50-60-70-80-100-F3-28FE24
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HA28
VRT-140B-28-35-40-50-60-70-80-100-F3-28HA28
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HF24
VRT-140B-28-35-40-50-60-70-80-100-F3-28HF24
VRT-140B-4-5-6-7-8-10-16-20-25-F3-38MB35
VRT-140B-28-35-40-50-60-70-80-100-F3-38MB35
VRT-140B-4-5-6-7-8-10-16-20-25-F3-28HB24
VRT-140B-28-35-40-50-60-70-80-100-F3-28HB24
VRT-140B-4-5-6-7-8-10-16-20-25-F3-48MB42
VRT-140B-28-35-40-50-60-70-80-100-F3-48MB42
山坑乡MPVB-090B-070-P2-19-70-90用心提升
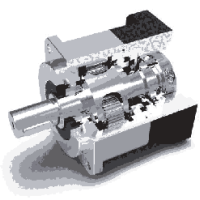
步进式行星减速器是一种精密的传动装置,广泛应用于各种工业领域。其减速比大小和惯量之间存在一定的关系。下面将对此进行阐述。
一、减速比大小对惯量的影响
减速比大小是指行星减速器输入轴与输出轴之间的转速比。减速比大小的选择对于惯量有着直接的影响。
惯量匹配:减速比大小决定了行星减速器的输出转速与输入转速的比值。在特定的应用场景下,减速比大小的选取需要与负载惯量相匹配,以确保传动的平稳性和精度。如果减速比过大,可能导致负载惯量与减速器的惯量不匹配,从而影响传动的平稳性和精度。
负载能力:减速比大小也直接影响了行星减速器的负载能力。在负载较大的情况下,选择较大的减速比可以降低输入轴的转速和扭矩,从而降低齿轮和轴承的磨损。然而,过大的减速比可能导致惯量过大,从而影响传动的平稳性和精度。
二、惯量对减速比大小的影响
惯量是指物体在运动中保持原有运动状态不变的性质。在行星减速器的应用中,惯量对减速比大小也有一定的影响。
平稳性:惯量过大可能导致行星减速器的输出转速不平稳,产生振动和噪音。这种情况下,需要选择较小的减速比来降低惯量,以确保传动的平稳性和精度。
传动效率:惯量过大还可能影响行星减速器的传动效率。过大的惯量可能导致传动过程中的能量损失增加,从而降低传动效率。为了提高传动效率,可以选择较小的减速比来降低惯量。
综上所述,步进式行星减速器的减速比大小和惯量之间存在相互影响的关系。在选择合适的减速比时,需要综合考虑负载惯量和传动平稳性、精度等因素。同时,在确定惯量时,也需要考虑减速比大小的影响。为了确保行星减速器的正常运行和延长其使用寿命,需要合理匹配减速比大小和惯量之间的关系。
在具体应用中,可以根据实际需求进行选择。例如,对于需要高精度和平稳性的传动系统,可以选择较小的减速比和适当的惯量匹配;对于负载较大的传动系统,可以选择较大的减速比来降低输入轴的转速和扭矩,同时注意合理控制惯量以避免对传动系统造成不良影响。此外,还可以考虑采用其他优化措施来提高行星减速器的性能和寿命,如选用高质量的材料、优化结构设计、采用先进的制造工艺等。
山坑乡MPVB-090B-070-P2-19-70-90用心提升

 微信客服
微信客服


 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情 查看详情
查看详情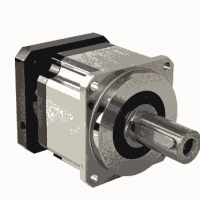 查看详情
查看详情